








Принцип работы сервопривода в робототехнике
Сервопривод – это устройство, которое играет ключевую роль в современной робототехнике. Оно обеспечивает точное позиционирование и контроль движения различных механических компонентов.
Сервоприводы широко применяются в промышленных роботах, беспилотных летательных аппаратах, 3D-принтерах и многих других областях.
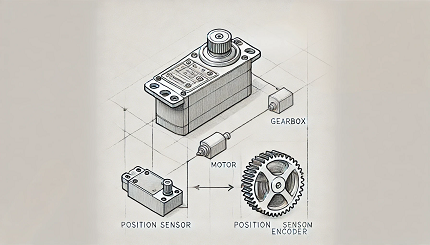
Основные компоненты сервопривода:
- Электродвигатель
- Редуктор
- Датчик положения (энкодер)
- Контроллер
Принцип работы сервопривода основан на системе обратной связи. Контроллер получает сигнал о желаемом положении и сравнивает его с текущим положением, измеренным датчиком. На основе этой информации контроллер управляет двигателем, чтобы достичь требуемого положения.
Интересный факт:
Первые сервоприводы были разработаны еще в 1920-х годах для использования в системах управления кораблями. Они помогали автоматически поддерживать курс судна, компенсируя влияние ветра и волн.
Процесс работы сервопривода:
- Получение команды: Контроллер получает сигнал о желаемом положении или скорости.
- Измерение текущего положения: Датчик (обычно энкодер) определяет текущее положение вала двигателя.
- Сравнение и расчет ошибки: Контроллер сравнивает желаемое положение с текущим и вычисляет разницу (ошибку).
- Генерация управляющего сигнала: На основе ошибки контроллер генерирует сигнал управления двигателем.
- Движение: Двигатель вращается, приводя в движение механизм через редуктор.
- Повторение цикла: Процесс повторяется непрерывно, обеспечивая точное позиционирование.
Интересный факт:
Современные высокоточные сервоприводы могут обеспечивать точность позиционирования до нескольких микрон (миллионных долей метра). Это позволяет использовать их в таких областях, как микрохирургия и производство микроэлектроники.
Преимущества сервоприводов в робототехнике:
- Высокая точность: Сервоприводы обеспечивают точное позиционирование, что критически важно для многих задач.
- Быстрая реакция: Благодаря системе обратной связи, сервоприводы могут быстро реагировать на изменения условий.
- Плавность движения: Контроль скорости и ускорения позволяет добиться плавных движений робота.
- Энергоэффективность: Сервоприводы потребляют энергию только при движении или удержании положения под нагрузкой.
- Универсальность: Они могут использоваться для управления различными типами механизмов.
Интересный факт:
В космической робототехнике используются специальные сервоприводы, способные работать в экстремальных условиях космоса, включая высокий вакуум и радиацию. Такие приводы применяются, например, в марсоходах и спутниках.
Области применения сервоприводов в робототехнике:
- Промышленные роботы: Сервоприводы обеспечивают точные движения манипуляторов при сборке, сварке, покраске и других операциях.
- Медицинские роботы: В хирургических роботах сервоприводы позволяют выполнять микроскопически точные движения.
- Беспилотные летательные аппараты: Сервоприводы управляют рулями и другими элементами управления дронов.
- Роботы-гуманоиды: Множество сервоприводов используется для имитации движений человеческого тела.
- 3D-принтеры: Сервоприводы обеспечивают точное позиционирование печатающей головки.
Интересный факт:
Самые маленькие коммерчески доступные сервоприводы имеют размер всего около 4,4 x 2,2 x 5,6 мм и весят менее 0,2 грамма. Они используются в микророботах и миниатюрных устройствах.
Заключение
Развитие технологий сервоприводов продолжается. Современные тенденции включают использование новых материалов, улучшение алгоритмов управления и интеграцию с искусственным интеллектом. Это позволяет создавать все более сложных и эффективных роботов, способных решать широкий спектр задач в различных областях человеческой деятельности.



Оставить комментарий